AVP功能对标分析

本文主要介绍下主流的车端、场端的AVP方案。
AVP功能,又叫代客泊车。在遥控设备上按下停车命令,车辆就可以自动从下车去开到停车场里,并自己找到车位停好,当车主需要的时候,再次从遥控设备上发出命令,车辆会自动回到上车区。整个过程没有人的参与,是一个典型的限定范围内低速无人驾驶应用场景。主要包括代客泊入,代客泊出两部分。
代客泊入:驾驶车辆到停车点,启用代客泊车,车辆自动行驶到停车区域(进入停车场,行驶到车位),完成停车;
代客泊出(召唤):启用召唤,车辆自动泊出,车辆自动行驶到固定或制定接车区域,完成召唤。

核心功能设计
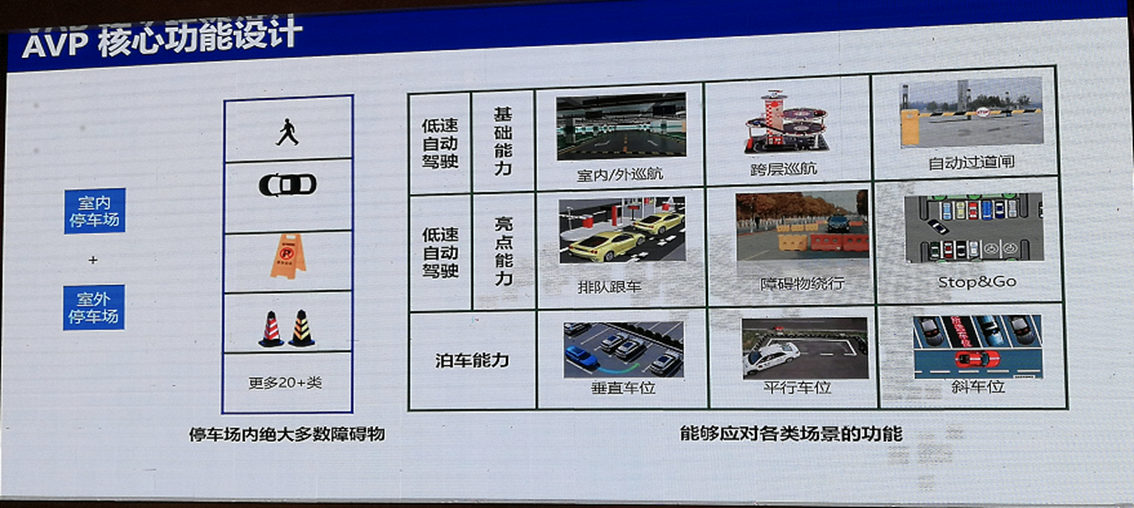
车端方案代表供应商——纵目科技
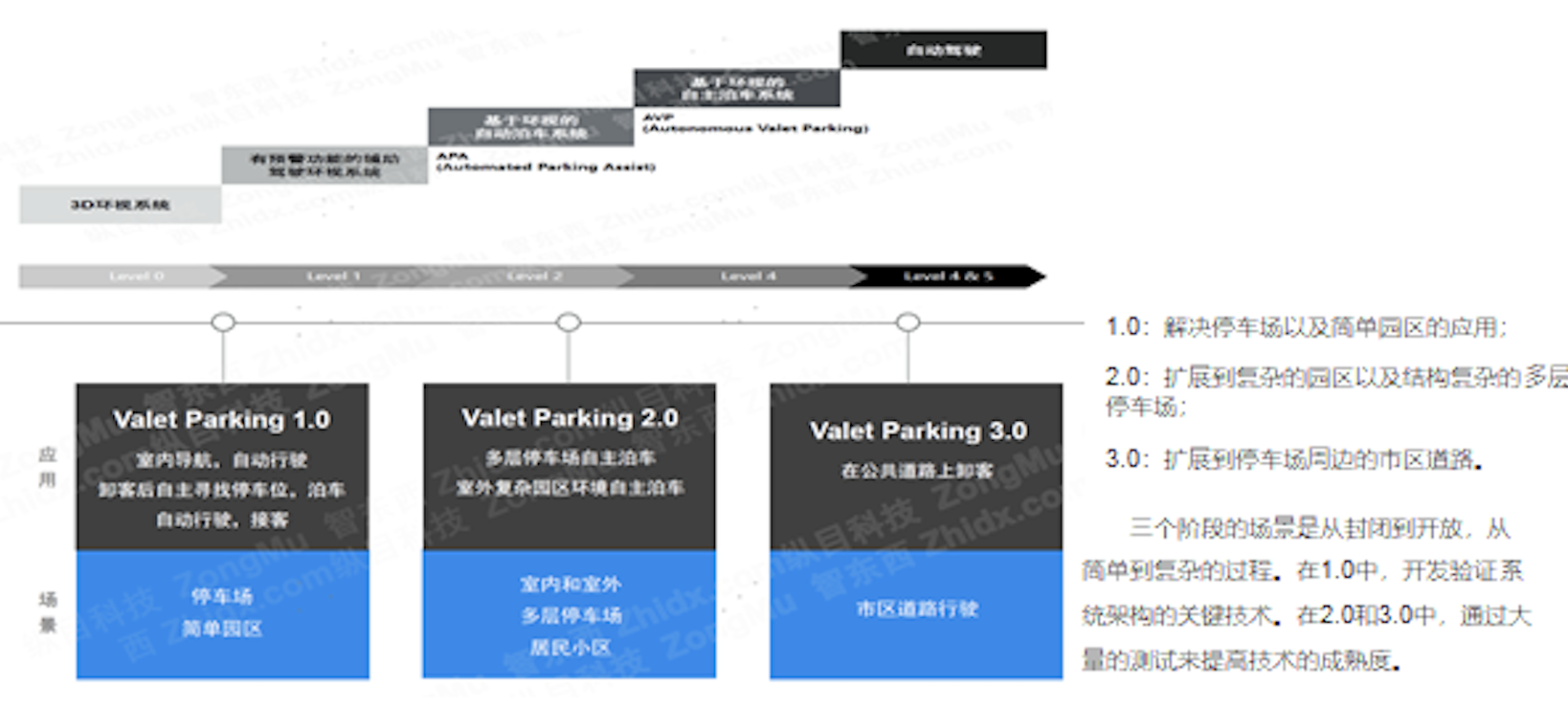
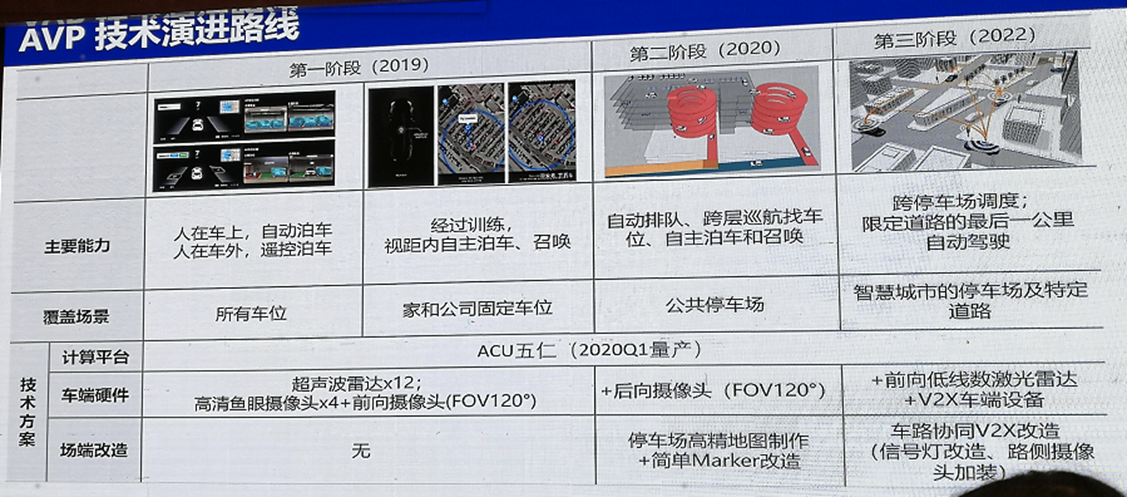
技术路线规划
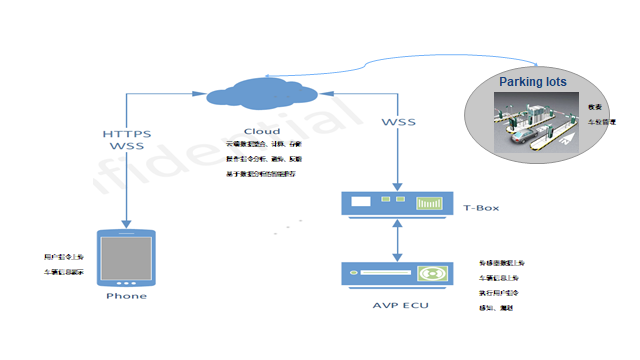
原理架构
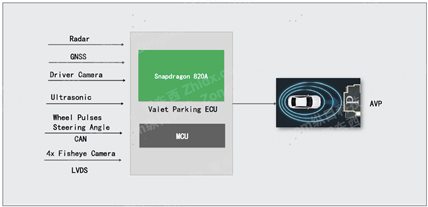
硬件架构
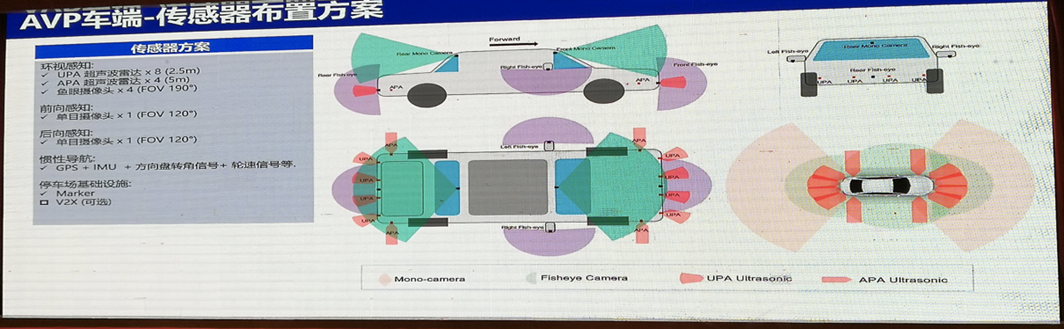
4个鱼眼摄像头+5个高分辨率毫米波雷达+12个超声波雷达+前视摄像头
鱼眼摄像头通过深度学习对停车场内部场景进行目标检测和语义分割,实现对环境的精确理解;
环视拼接所生成的俯视视角,通过深度神经网络,用来检测地面的停车位以及其他的地面标志;
SLAM构建地图;
摄像头+毫米波+超声波融合后,结合低成本的组合导航实现定位。

高通骁龙820A:复杂的深度学习、SLAM、规划等算法的计算;
NXPS32K:完成设计功能安全的控制。

实测的计算能力大概能够达到1.2Tops,高通820A里面有GPU、DSP可以实现深度学习的计算。
车端方案代表供应商——百度
技术路线规划
原理架构
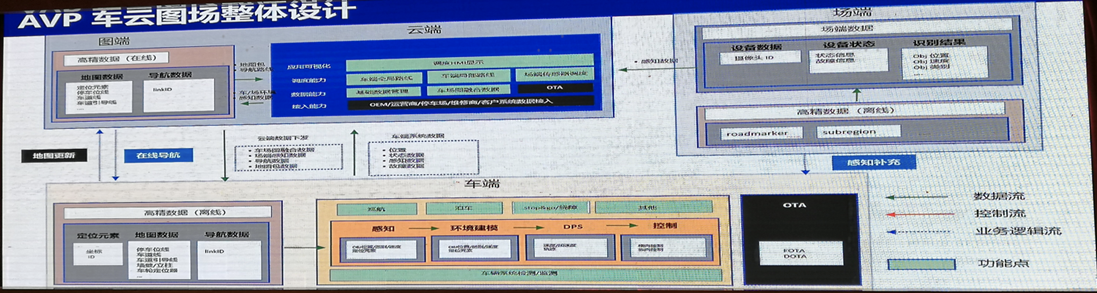
硬件架构
ACU(Apollo Computing Unit)-Advanced XA Zynq UltraScale MPSoC
该计算平台可以增加AI加速;执行1.35Tops(每秒1.35万亿次操作)。该处理器可以融合8个摄像机输入,12个通道的超声波雷达,激光雷达以及毫米波雷达接口的传感器数据,额定功率安全等级为ASIL-D。

场端方案代表供应商——博世+戴姆勒
技术路线规划
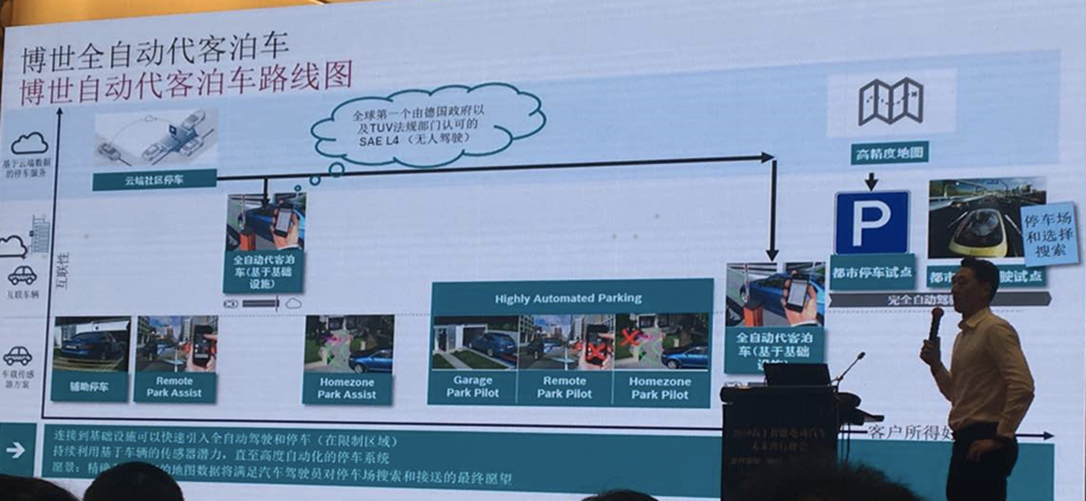
原理架构
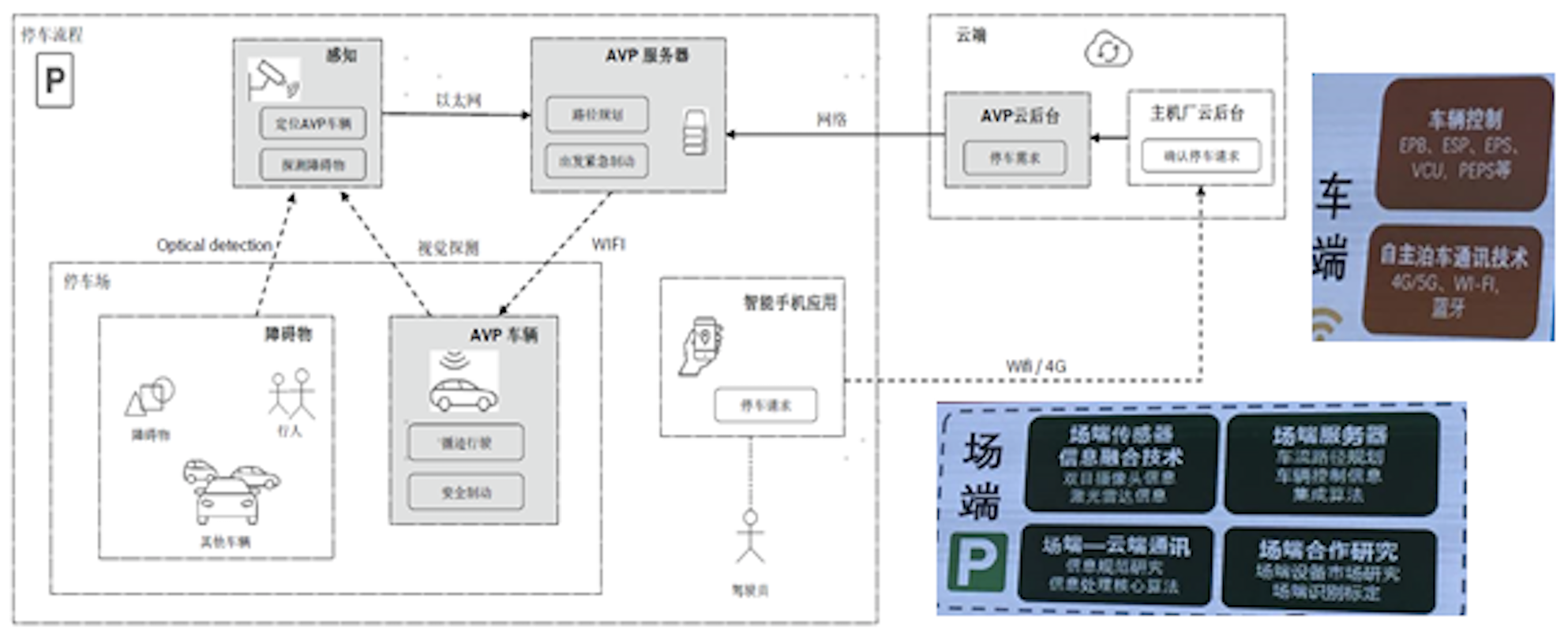
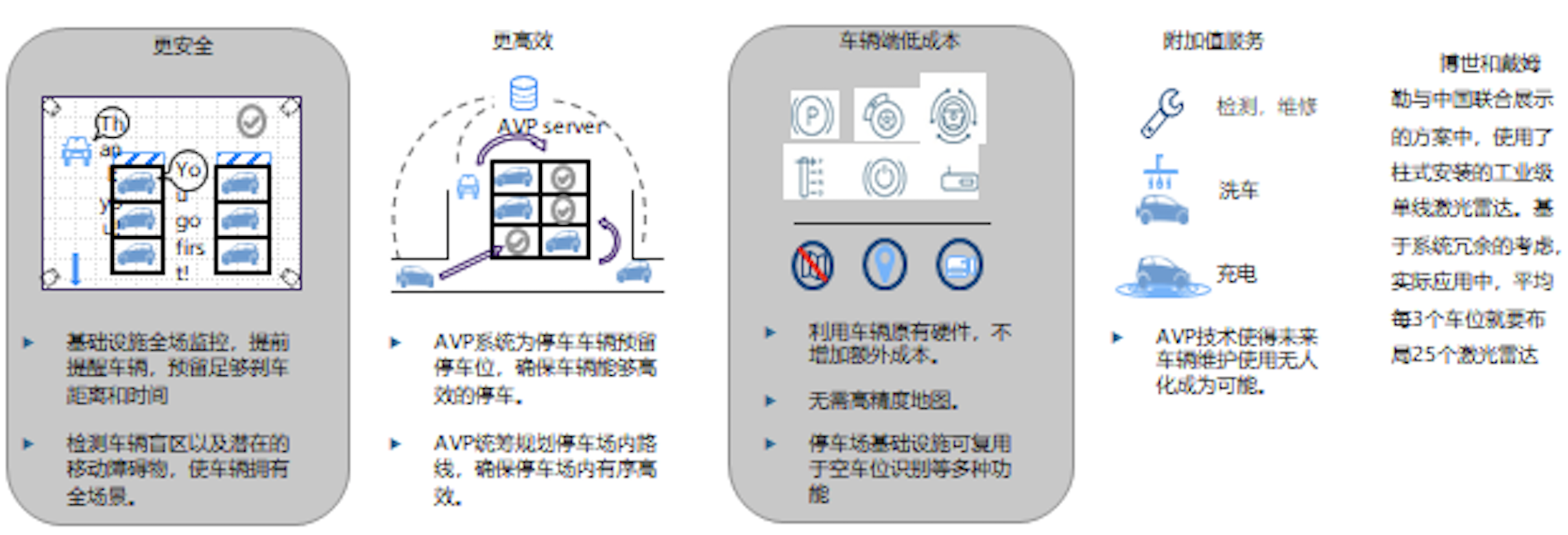
技术特点
博世AVP系统的技术核心为场端总控。不论是新建或现有停车场,只需要在特定位置部署对应的传感器(目前为单线激光雷达扫描,随后将迭代为博世自有双目高清摄像头形成的Godview上帝视角模式),对整个停车场进行实时扫描,规划对应路线,并通过V2X技术下发行进路线至车辆内的T-BOX,就可以指挥车辆。
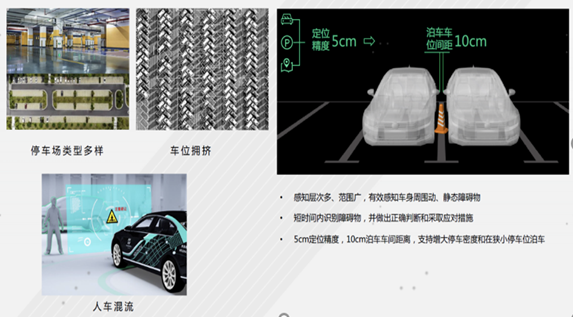
场端方案代表供应商——禾多
原理架构
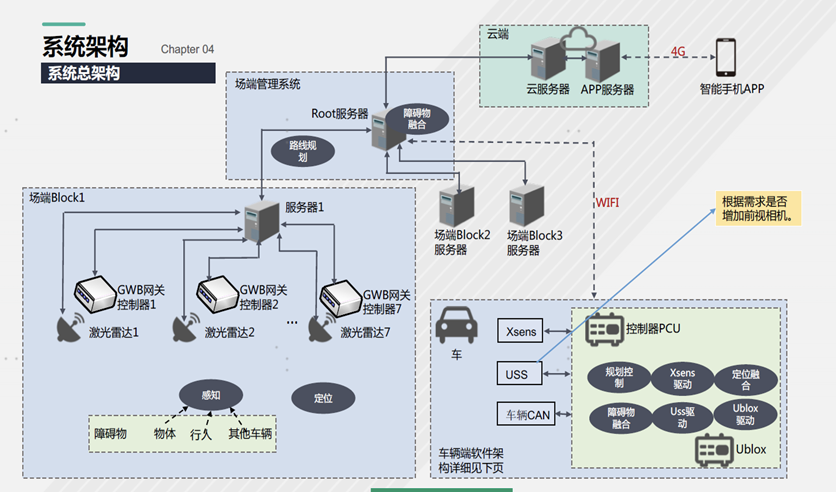


技术特点
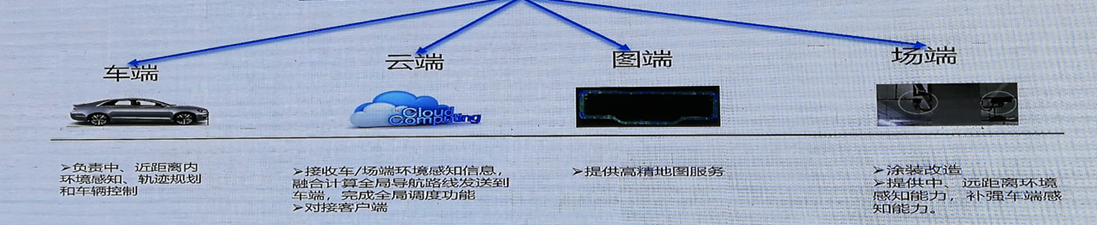
车端和场端以外,还增加了高精度地图,是一套三端合一的技术方案。通过三端的合一,基于三端集成,HoloParking在感知、定位、路径规划方面更加智能。系统具有足够的冗余层,具有较高的鲁棒性。
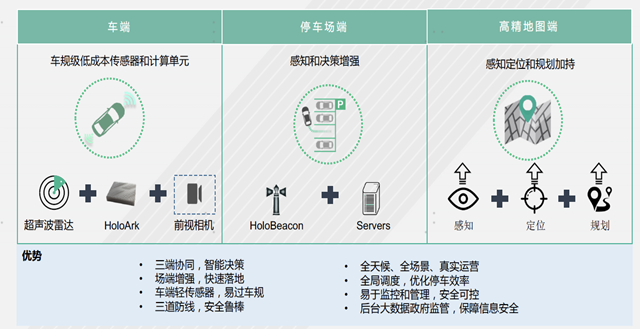
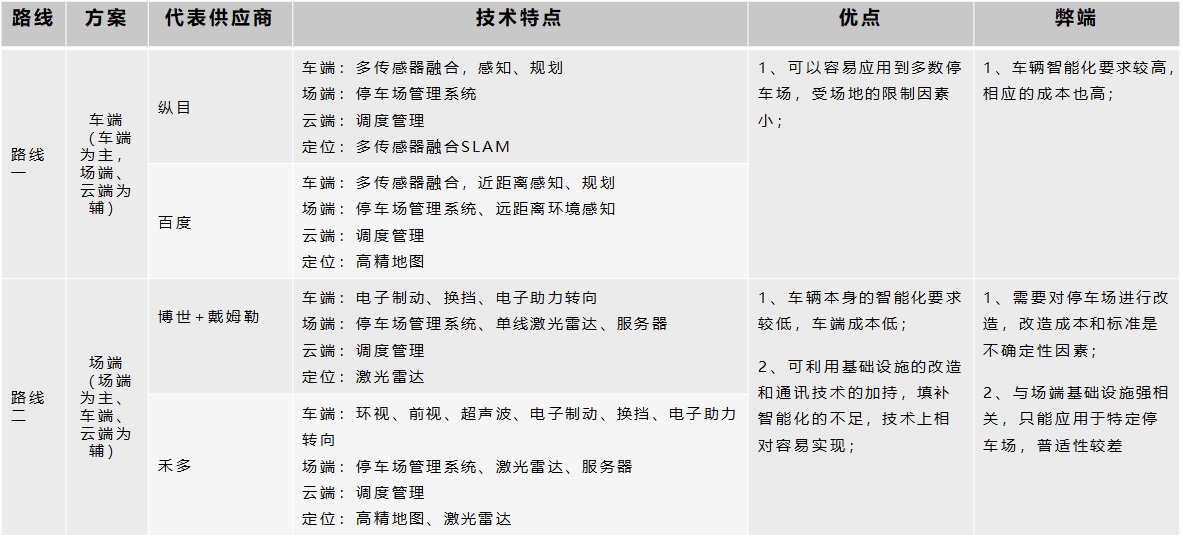
车端和场端方案的优缺点