小鹏G3自动泊车功能

本文主要介绍小鹏G3自动泊车功能的适用场景,适用过程,以及功能的优缺点。
小鹏G3从一开始,就在宣传主打泊车功能,用户研究也的确做了不好工作。
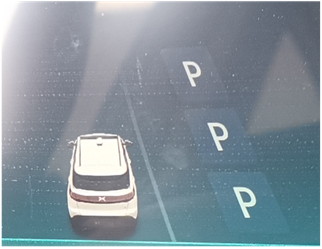
适用场景: 采用超声波与摄像头融合方案,能支持两辆车之间的空间车位&地面标示车位;
自动泊入功能用户使用过程:
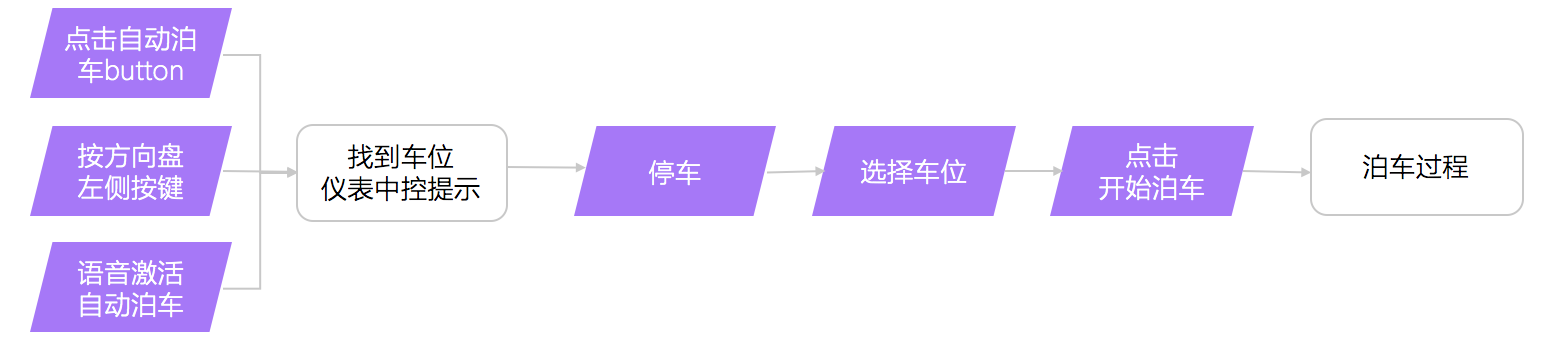

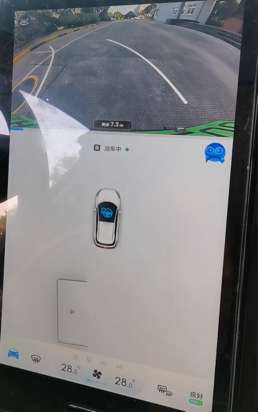
开启方式:共三种,自动泊车button,方向盘物理按键(需自定义),语音激活;
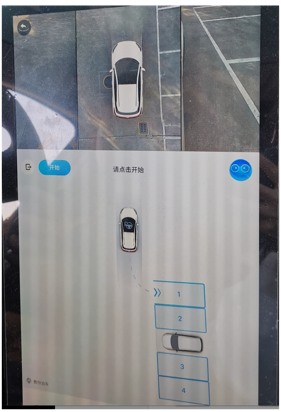
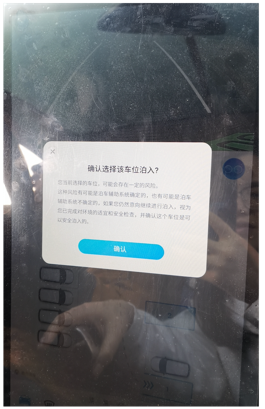
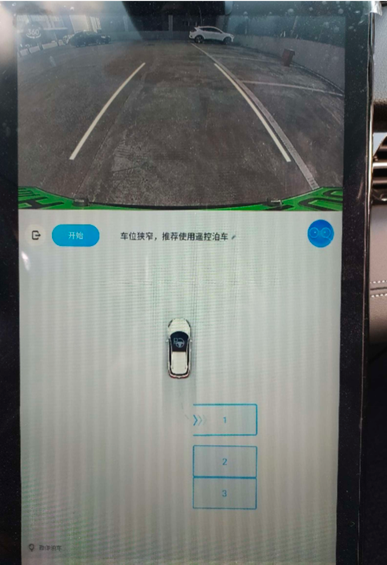
车位区分:可泊入车位、不确定车位(带问号,用户选择后弹出对话框让用户确认,如上图)、不可用车位;
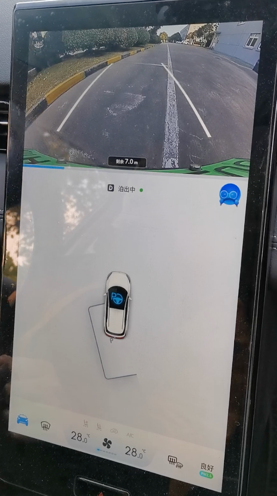
视图切换:后视图/全景视图+左视图+右视图;
自动泊出功能用户使用过程:

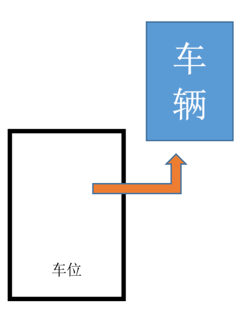
泊出完成标志:水平车位:完全泊出;垂直车位:车头泊出,能打开车门;
开启方式:挂入R档,且只有系统泊入的才支持泊出,并且要求车辆位置无变化;
在自动泊车过程中(泊入&泊出),驾驶员干预( 踩制动、踩油门 、打开四门两盖 ),遇到障碍物等会导致泊车暂停,不在干预且满足泊车条件后,或者障碍物消失后,点击继续泊车可继续进行。(至多暂停2次)。
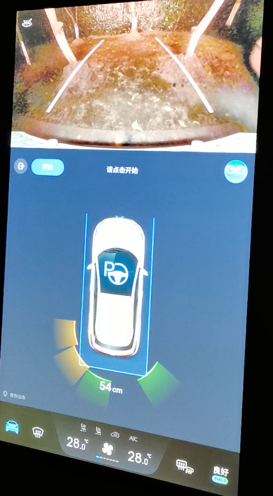
在自动泊车过程中(泊入&泊出),界面显示以下内容:
显示泊车动画;
自车速度;
泊车虚拟人物;
文字提示;
语音播报(需设置,泊车全过程);
障碍物报警 ;
后视图/全景视图+左视图+右视图;
功能优点:
——功能多,覆盖场景齐全(还有遥控泊入,垂直进退/召唤功能);
——开启方式多样(三种方式),方便用户操作;
——搜索车位成功率高(超声波和视觉融合方案),提升用户体验 ;
——狭窄车位,主动推送用户使用遥控泊车;
——搜索过程中车位实时变化,且根据情况不同做对应区分;
——泊车过程,实时显示泊车动画(自车不动,车位动),与障碍物报警相结合,方便用户了解实际情况;
可能存在的不足如下:
——泊车过程中,无法踩着刹车泊车;
——泊车过程中,视图仅为后视图/全景视图+左视图+右视图,无法根据档位切换视图;