特斯拉Model 3自动辅助导航驾驶NOA

本文主要介绍下NOA功能的适用场景、开启方式、变道时机、以及功能的优缺点。
特斯拉的自动辅助导航驾驶NOA功能的出现,也是一大亮点,解决了多车道情况下根据导航信息自主变道的问题,使得在高速公路上的“自动驾驶”更为方便快捷。
适用场景: 在辅助转向autopilot的基础上,结合导航系统,能够给驾驶员建议驶入、驶出高速以及超车的时机,并在驾驶者监控下实现自主变道超车。驾驶员可设定是否启动车辆即启用NOA功能,根据速度变道的时机及变道是否需要确认,变道过程是否需要提醒。

开启方式一: 用户选择启动车辆即启用自动辅助导航驾驶

开启方式二: 用户选择启动车辆不启用自动辅助导航驾驶

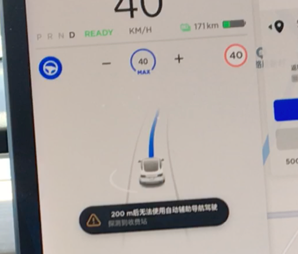
满足使用NOA的路段:设定好导航路径后,点击查看路径规划,在可使用NOA的路段前有灰色的方向盘图示

变道时机: 系统权衡自车车速、前车车速、周围车辆情况、高速出口距离等众多因素作出合适的变道请求,结合用户自定义(是否确认),在导航详情展示区及场景重构区域给出提示。 l除了根据路线和速度进行变道之外,还会发出右侧变道请求,在不超车时让出最左侧车道。


功能优点:
——可以贯穿匝道,扩充使用场景,可行驶至收费站收费口 ;
——主动推送式变道,满足条件提醒用户,可直接变道(用户设置);
——满足NOA条件,自动辅助转向可直接切换至自动导航辅助驾驶;
——200m,100m,75m,50m,探测到收费站会给用户提示,切换为Autopilot会有声音提示;
——变道条件、是否需要提醒、提醒方式可由用户设置;
可能存在的不足如下:
——最后1km时开始变道,存在无法驶出匝道的情况,出现一次,即会导致用户迟疑;
——柔和模式下,变道也相对极端,存在连续两次变道情况 ,变道时机对不同用户的感觉不一样;
——进入匝道口,减速不明显,存在不减速情况,会导致用户惊慌,进而产生对系统的不信任;
——达到收费站,跟随最近的车辆行驶,无法选择排队最短的车队、ETC或人工。