如何通过RGB值找到PS拾色器的坐标

纯属兴趣
RGB数值中数值最大的影响明度及色相范围、数值第二大的辅助影响色相、数值最小的影响饱和度和色相
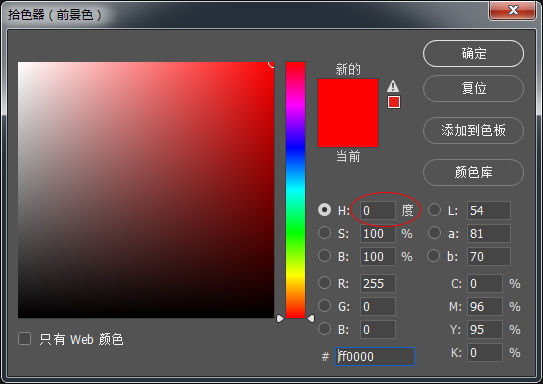
认识一下色相饱和度明度三轴在拾色器上的位置

假设色值为R240 G164 B58
我们可以通过RGB数值中最大的色值判断出这个色的明度及色相范围,这里最大值为R240可以判断该色明度为240,色相范围为品红—红—黄之间
色相范围判断标准为光色三原色RGB之间的混合色
R(红),G(绿),B(蓝) C(青),M(品红),Y(黄)
R+G=Y(红色+绿色=黄色),R+B=M(红色+蓝色=品红),G+B=C(绿色+蓝色=青色)
该色值中最大的为红,和其他原色混合的区间就是品红、红、黄
把明度轴划分成256份放在第241份的地方(色值最大为255,但0也是色值中的一项所以实际需要放置在240+1的地方)

再确认第二色值G164

第二色值辅助影响色相观察可以发现色相轴游标发生了改变。
改变计算方法为
其中最大值为红色 第二色值为绿色 他们之间的混合色为黄色
红色到黄色中间的区域划分成240份,同时红色向黄色偏移164份
也可以用HSB中的H(色相度数)计算 红为0° 黄为60°

1-(240-164)/240=0.6833 意味着正红向黄色方向走68.33%的距离
60°(黄色)*0.6833 =40.998°(41°)
简写为164*60/240=41°

再确认明度。我们可以通过HSB中的S(饱和度)来确定
(240-58)/240=0.7583(0.76) 0.7583*100=75.83(76)

由于最小值的进入导致H(色相度数)发生改变需要重新计算(往红色方向偏移,58数值对164影响非常小只偏移了6度)
计算公式是原色色相(RGB最大值色相)+(-)(中间值-最小值)*60/(最大值-最小值)
(164-58)*60/(240-58)=34.94(35)
总结
RGB数值对应PS拾色器坐标

第一点看三个数值的比例关系决定出色相(如果最小值小于第二数值一倍以上的话影响不大可以忽略)
第二点看最大值,最大值决定这个色值在拾色器上的高度(明度,亮度)
第三点看最小值对最大值的影响决定这个色值在拾色器的左右方向(饱和度,鲜艳程度)