车载HMI功能-辅助驾驶介绍与设计思考

本文介绍了自动泊车系统的迭代以及设计和交互方向的延展
很多小伙伴都在问我,车机上的功能,除了传统的导航,多媒体,天气等模块,还有哪些跟汽车相关的功能呢?在技术的基础上,我们又该如何做交互和视觉的突破呢?今天,就让我为小伙伴们介绍一个车机的功能——自动泊车系统,我会通过对技术的简单介绍,一起来和小伙伴探讨一下如何在设计以及交互上进行延展吧!!!
定义:
首先,我们先来了解一下,什么是自动泊车系统。顾名思义,自动泊车系统是汽车可以不需要人工干预,通过车载传感器和控制系统的帮助就可以自动识别车位,并自动把车辆驶入到指定的车位。
有的小伙伴会说,自动泊车不就是APA功能嘛。其实,APA只是第一代的自动泊车,目前有四代自动泊车系统。
第一代自动泊车:APA(Auto Parking Asist) 自动泊车
第二代自动泊车:RPA(Remote Parking Asist) 远程遥控泊车
第三代自动泊车:HPA(Home-Zone Parking)自主学习泊车
第四代自动泊车:AVP(Automated Valet Parking) 自主代客泊车
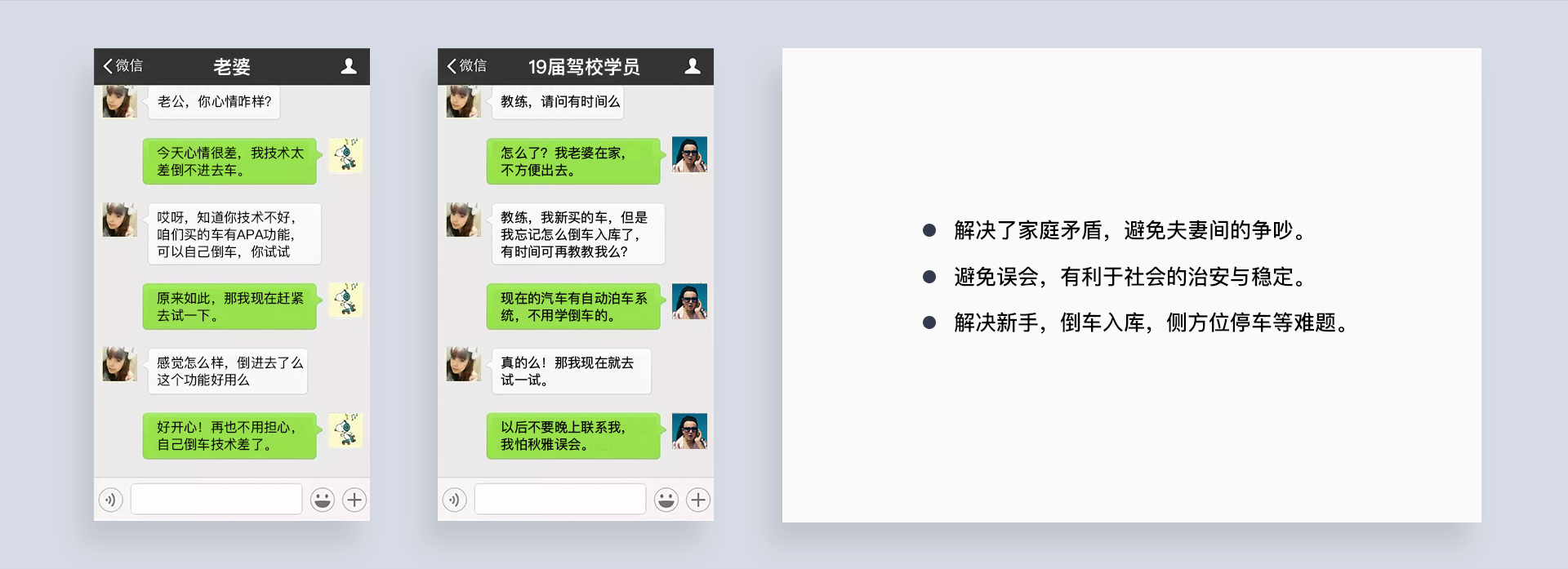
其实无论是功能还是设计上的迭代,都是为了解决人们生活中的问题,根本目的还是让人们的生活更加便利。在节省时间的同时,又能大大提高效率从而降低生活和工作的成本,提高幸福感。那么这四代泊车系统是如何一步一步提高我们的幸福感的呢?我们通过案例来看看,APA为我们解决了哪些矛盾。
第一代自动泊车:
泊车辅助系统在汽车低速巡航时,使用超声波雷达感知周围环境,帮助用户选择合适的车位,或者用户选择好相应的车位在车内开启泊车辅助功能时,汽车才会泊入车位。APA自动泊车所以依赖的传感器主要是超声波雷达,APA超声波雷达的探测范围远而窄,UPA超声波雷达的探测范围近而宽,通俗点讲,及时APA雷达负责找车位,UPA雷达负责更精确的测距和校准。
所以我们可以看到,APA适用的场景是,驾驶员需要在车内,在低速的行驶过程中,开启功能,更适合新手完成比较有难度的倒车入库,以及侧方位停车。
第二代自动泊车:
远程遥控泊车辅助系统实际上就是在第一代的基础上进行升级,除了搭载超声波雷达之外,还额外增加了远程遥控系统。那么他为我们生活带来了哪些便利呢?
想象一下,当你过年去超市采购,由于人多,你找了好久的车位,当你行驶至一个空车位,发现左右两辆车停泊的距离比较近,你不得不放弃这来之不易的车位。又或者你不想放弃这宝贵的车位,废了九牛二虎之力终于把车停好,但这时你不想刮蹭到别人的车辆,你只好打开后备箱,然后钻出至车外。是不是会有些尴尬?而且很容易因为不谨慎,剐蹭了他人的汽车。
如果此时你有远程遥控泊车系统,那么当你找到空车位后,你只需要将汽车挂入停车挡位,然后就可以离开车辆。你可以通过手机对汽车发送泊车指令,控制并且监视个泊车的过程。在你泊出车位时,也可以使用手机或者其他设备的“一键泊出”功能,让汽车泊出到指定地点。
RPA远程遥控泊车与第一代泊车辅助系统的最大区别就是加入了车载蓝牙模块,就是用户不需要坐在汽车里,可以在汽车外进行检测。
第三代自动泊车:
想象一下,用户在下班后,不想去地库或者车位去取车,通过用手机发送指令后,汽车自己启动,行驶到用户面前。这个看似高科技的出行方式已经实现。通过在汽车上加入了鱼眼相机。鱼眼相机的镜头就像鱼眼一样,能够看到超过180°范围内的东西,在汽车四周各装一个鱼眼相机,将他们的图像进行畸变矫正后再拼接,即可实现360°的环境感知。
有了全景监控的视角,那么还需要解决的就是如何让车辆行驶较长的距离,从而达到用户目标的指定位置。第三代自学习泊车辅助系统的核心技术叫做——SLAM(Simultaneous Localization And Mapping,即时定位与地图构建)。最早的SLAM在军事中起着重要的作用,目前逐渐过渡到车载领域。
不知道小伙伴们有没有看过电影《神探夏洛克》,夏洛克有着过目不忘的记忆力,他采用的记忆方法叫做“记忆宫殿”,就是把记忆的东西,和我们脑海中的房间联系起来,例如我们住过的别墅,这个别墅有3层楼,第一层有卧室和客厅,客厅里家具的摆放位置,厨房里的布局,卫生间的建筑面积等等这些被我们的大脑记录,这些所有信息帮助我们在脑海中建立了地图(Map),房间的布局,家具的大小、位置关系等信息被称作这个图的特征(Feature)。当去新的地方,就相当于解锁了一个新的地图,当地图足够多,我们就可以迅速立刻判断出自己位于哪一层、哪个房间。这就是建图和定位的简单描述。SLAM技术,就是通过构建地图的方式并且配合360全景相机达到自动驾驶的目的。
第四代自动泊车:
最理想的泊车辅助场景应该是,用户在任意地点下车,并且完成驻车后可以马上离开,把找停车位和停车的工作交给汽车,汽车停好后,发条信息给驾驶员,告知自己停在哪。在我们下班时,给汽车发条信息,汽车即可远程启动、泊出库位,并行驶到驾驶员设定的接驳点。不需要用户操纵与监控。若用户下达泊车指令,可实现多车动态的自动等待进入泊车位,用户也可以自行设定泊车时间等。第四代自动泊车方案主要提升的地方在于提升汽车远距离感知的能力以及安全性,所以会对超声波雷达的感知范围进行提升,部分车企会采用激光雷达等解决方案,有的为了降低成本会采用前置摄像头等方法来提升汽车的感知能力。
通过以上内容,小伙伴应该对解辅助驾驶功能以及技术上的实现手段有了大致的了解,那么重点来了,基于现有的功能以及技术,我们基于这个功能,在交互以及技术上如何创新呢?
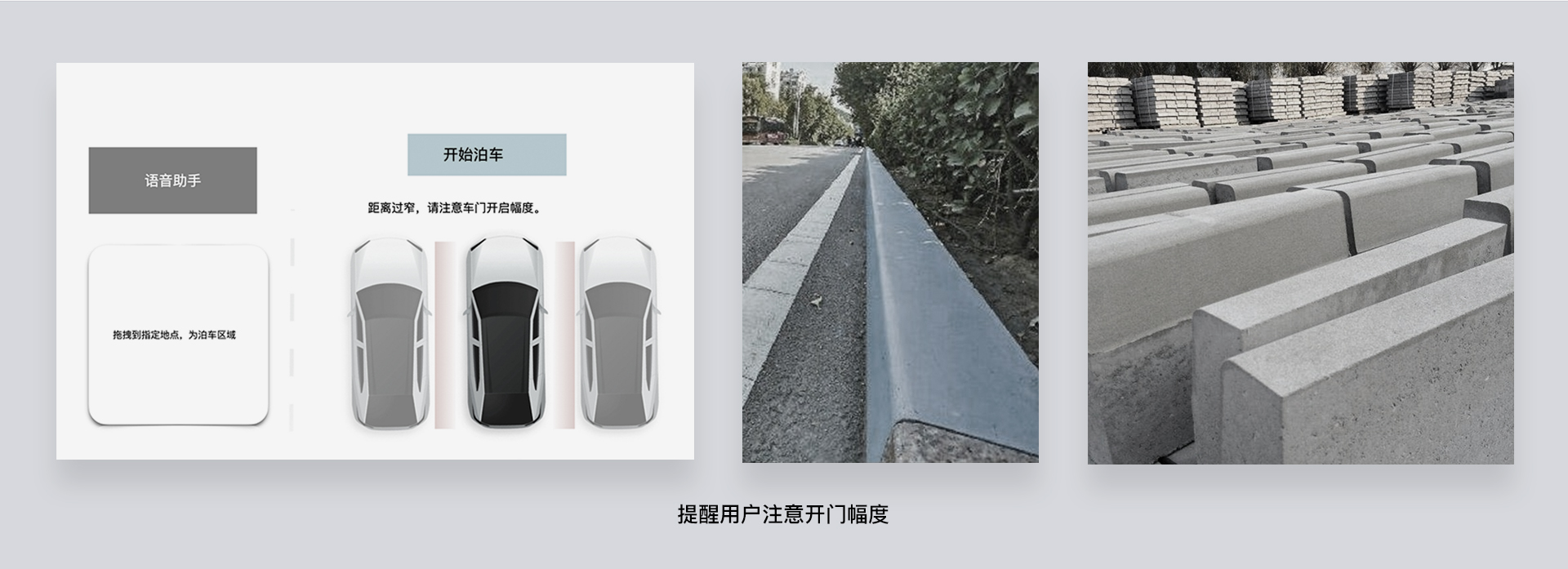
在上文中,我们提到UPA超声波雷达主要用于检测距离并且进行精准的校准。那么我们可以利用这一点,进行交互创新的小思考,去解决用车场景遇到的痛点。例如在我们靠路边停好车后,由于对于马路牙子也就是路肩石的高度,以及距离感知不强,会导致在开门的时候对车门进行刮蹭。那么我们在驻车后,可以利用超声波传感器对马路牙子进行高度以及距离的探测,当有刮蹭的可能性时,可以通过界面UI以及声音对用户进行提示。
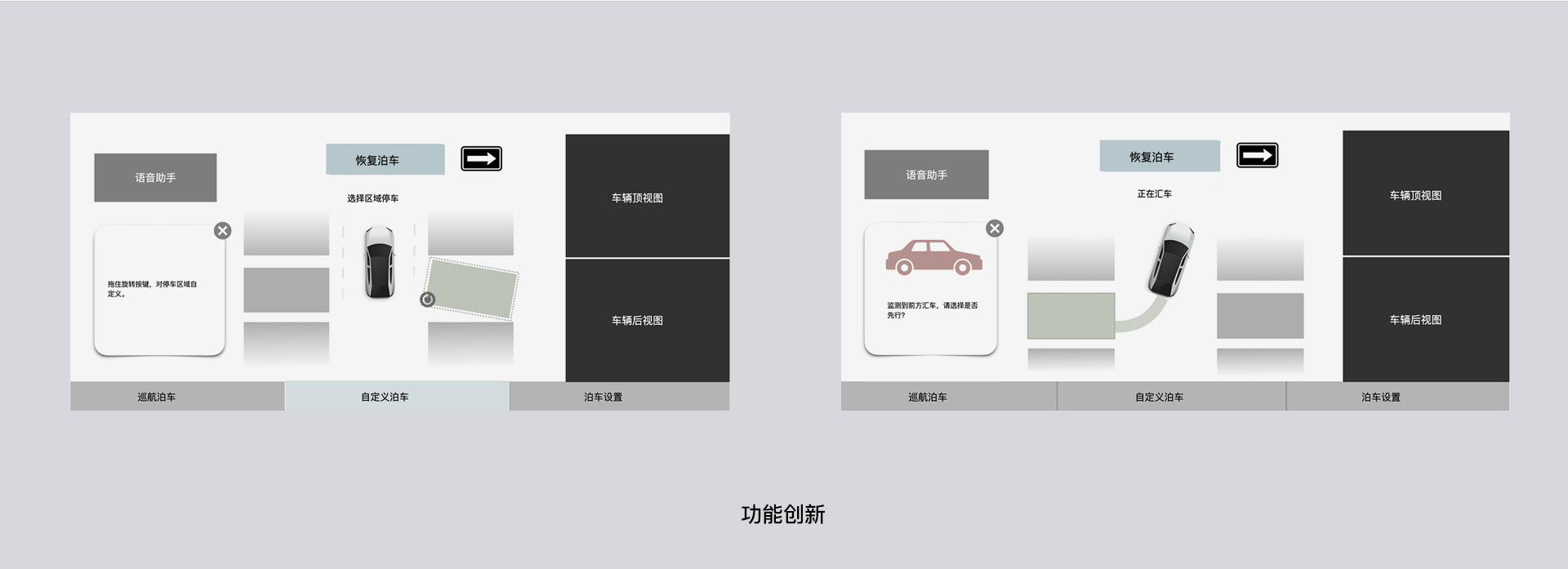
再比如,我们在了解到用户如果在没有车位的情况下,可以自己选择车位的位置,车辆通过超声波雷达去判断是否可以在当前地段自定义车位,不可以选择区域可以用红色提示用户,绿色代表可以把车位设定在这个位置。并且用户可以对角度进行编辑。从视觉层面上讲,在行车过程中,如果遇到汇车情况下,设计师可以对汇车的UI配图文言等进行创意设计。甚至还可以从行驶路线,开启方式,用户场景等多方面入手,去探究设计的可能性。

希望通过本文可以对小伙伴对车机的功能有所了解,并且可以举一反三,对自己的设计有一个全面的了解,也希望小伙伴们可以在车载HMI设计上更上一层楼,有所突破,也希望有疑问或者有兴趣的小伙伴可以私信我们,进行探讨和交流~